Create a free profile to get unlimited access to exclusive videos, sweepstakes, and more!
Houston, we have the ultracool winners of NASA’s Venus rover design contest

Mars may be treacherous enough for a robot crawling over its jagged hills and gaping craters, but Venus is one place spacecraft should fear to tread, at least if they had brains.
There is a reason that a planet swirling with toxic clouds that only look pretty was named for the Greco-Roman goddess of passion. It is scorching hot. Back in March, NASA’s Innovative Advanced Concepts program (NIAC) crowdsourced for someone who could dream up a mechanical obstacle avoidance sensor that could keep their AREE (Automaton Rover for Extreme Environments) rover concept alive in the heat and toxic fumes and prevent it from crashing into anything on the Venusian surface. No wonder the challenge was called “Exploring Hell: Avoiding Obstacles on a Clockwork Rover.”
And now... Houston, we have the winners!
“The response from the community was incredible and better than I ever dreamed," said Jonathan Sauder, NASA JPL senior mechatronics engineer.
Each of the five finalists will have their designs considered as AREE continues to evolve. They needed to somehow conceptualize something that would help the rover find its way without the advanced, hypersensitive electronic sensors that would otherwise be used if Venus wasn’t the living embodiment of Dante’s seventh circle of the Inferno. NASA had already swapped out those sensors for steampunk-ish gears and other parts made from heat-resistant alloys. Any electronics used can survive such high temperatures but have limited functions. The challenge was to think up a device that would last for months in what is, as even NASA perceives it, a literal hell.
First place: “Venus Feelers” by Youssef Ghali
For Egyptian architect and product designer Youssef Ghali, it’s all about a minimalist approach to the project that he calls “back to the basics from a new point of view.” His version of the sensor uses triple rotating wheels to sense bumps on the surface and successfully roll over them. If the rover approaches something too high or deep, each of the triple wheels is attached to an arm whose hinge will give for such irregularities in the terrain.
Second Place: “Skid n’ Bump” by Team Rovetronics
Martin Grabau and Eric Seeberger, the geniuses behind Team Rovetronics, love to geek out to aerospace engineering and designed what they call an “all-mechanical, mostly passive” sensor. The hinged metal contraption attached to the front of the rover feels out upcoming obstacles so the machine knows what it’s headed for. If the sensor can’t get over an upcoming bump, it will try until it can, readjusting itself until the rest of the rover can follow.

Third Place: “Direction Based Obstacle Sensor (DBOS)” by Callum Heron
As a mechatronics engineer who focuses on mechanics and is obsessed with antique springs and engines, Callum Heron was more than thrilled to take on this project. He actually dropped another project just to work on this. Inspired by retro machinery and The Martian, Heron came up with a device that links together a rock sensor and a tilt sensor that can gauge the unknown landscape ahead and give the rover a sense of what it’s up against.
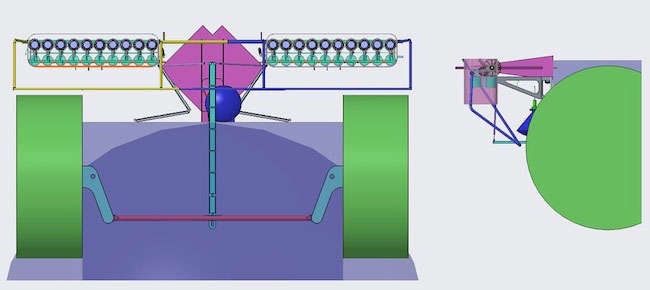
Best Prototype: “AMII Sensor” by KOB ART
KOB ART really went all out by designing a full-scale prototype that impressed NASA judges enough to create one of two additional categories. The design company from Riga, Latvia merges architecture and design with function and practicality. Their version of an obstacle sensor triggers a seesaw with a pull rod as the rover climbs over rocks. The seesaw then pushes a trigger ball into a carousel gear that triggers the sensor pin and readjusts the rover.
Most Innovative: “ECHOS: Evaluate Cliffs Holes Objects and Slopes” by Matthew Reynolds
Mechanical engineer Matthew Reynolds went with a remote hole detector that works with mechanical SONAR (as opposed to an electrical one) that can penetrate Venus’ thick atmosphere. This is the same kind of method creatures such as bats use to find food — except their tech is built right in. Just like the animal, the detector will make noise that will bounce off any obstacle in its way to prepare the rover for difficulties ahead.
NASA could incorporate one or all of these ideas into AREE. Which one would you want to make it to Venus?


























