Create a free profile to get unlimited access to exclusive videos, sweepstakes, and more!
Robotic hand created with sense of touch, better at picking up objects (or punching kaiju)
If a robot is going to punch something, it should at least feel the snap in its knuckles.

When a breach opens up in the Pacific Ocean and hoards of violent kaiju come pouring through from another dimension, there’s not much you can do except build a fleet of battle robots to keep them at bay. A giant metal punching machine is a great thing to have, but it’s a lot more effective if you can feel what you’re punching and respond to that stimulus. In the world of Pacific Rim, pilots utilize a telepathic link to control their Jaeger and feel what it feels. In the real world, we’re not so lucky.
Scientists and engineers are constantly working to improve the functionality of robots and the sorts of information they’re able to collect and relay to their users. Recent advancements by Sandra Q. Liu and Edward H. Adelson, both from MIT’s Computer Science and Artificial Intelligence Laboratory, have granted the sense of touch to a simple robotic hand known as a Fin Ray gripper. Their findings were presented at the 2022 IEEE 5th International Conference on soft robotics.
Fin Ray grippers are made of a flexible plastic and covered in ridges. The structure is modeled after the tails of fishes, allowing it to curve toward a source of pressure, instead of away from it. As a result, when a pair of grippers grabs hold of an object, they curl around it. For their experiments, the team hollowed out a pair of grippers and shoved an array of sensors inside.
An embedded camera watches the surface of the grippers as they grab hold of objects and analyzes the way the fingers deform in the presence of pressure. That deformation provides sensory information about the texture, shape, and feel of an object at the places it comes into contact with the gripper.
“Essentially, there’s a camera looking at the soft rubber surface. When the rubber comes into contact with anything, the camera can pick up those signals,” Liu told SYFY WIRE.
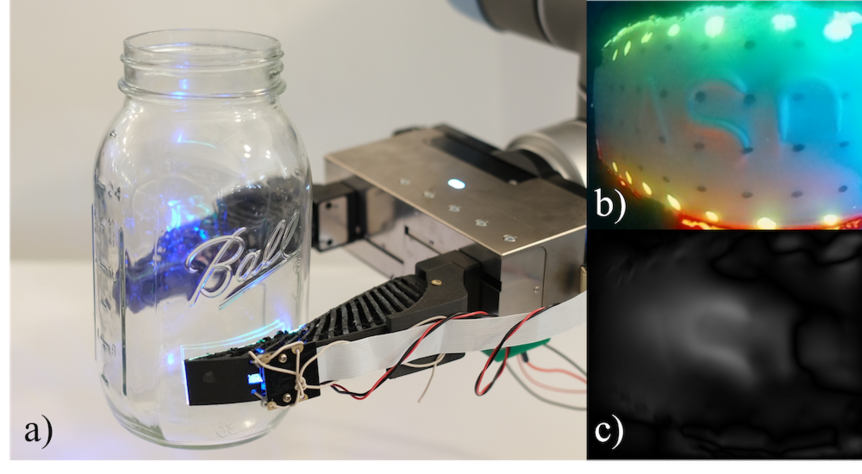
The sensory information is sophisticated enough to pick up fine details on the surface of handled objects. In experiments, the robot was able to sense the letters on the surface of a jar and individual seeds on the surface of a plastic strawberry. This level of sensory awareness could be a considerable help in places where robots interact with humans.
“There’s a lot of potential applications, like homecare robots. If you need to have a robot assist someone in dressing or in the kitchen, having this sort of sensory touching can help because it’s a lot safer to interact with people,” Liu said.
Granting a sense of touch could also help robots to work more effectively in factory or agricultural settings. For instance, a robot could determine if an individual fruit is ripe by feeling how hard or soft it is. It could also allow robots to find specific objects from a collection by searching for specific sensory cues inherent to the desired object.
While the current gripper is a simple two-finger device, the same technology could be implemented in any number of robotic devices, including fully anthropomorphic human hand analogues. Looking forward, Liu is hopeful robots with sensory capabilities could relay that information in real-time to a human user. A prosthetic device with the ability to feel could restore some sense of touch to a person with a missing limb.
“That’s the biggest overarching goal we’re working toward. Or at least that’s something I’m really interested in. That’s way down the road but something we’re working toward,” Liu said.
So far, no otherworldly monsters have emerged from the world’s oceans in need of punching and we’re keeping our robotic Fin Ray fingers crossed that it stays that way.


























